2016年の夏頃に室内用ドローン(クアッドコプター)を購入してからドローンにはまってしまいました.
ジャイロや加速度センサーを搭載していて簡単に安定した飛行を楽しめます.
10年ほど前に室内用の4chラジコンヘリを買ったことがありますが,なかなかホバリングが上達せずうまく飛ばせませんでした.
当時はインドアプレーン等が一部で流行して,インドアプレーンに関する電子工作の本が出版されたり,ハニービーという簡単な赤外線コントロールのヘリコプターが登場し始めた頃でした.
自分は空を飛ぶ模型の自作に興味があり,バッテリーやモーターやプロペラ等をいくつか買ってテストしてみましたが,入手できる部品は安くはなく種類も限られており,必要な推力を得て室内で飛ばせるような模型を作るのは難しいと感じてあきらめました.
その頃はクアッドコプターが販売されていた記憶はありませんし,ラジコンのヘリコプターもラダーの制御だけにジャイロを使用していているものが多かったと思います.
一方現在では,様々なドローンやラジコンヘリが販売されていて国内メーカーの室内用クアッドコプターの中には1,000円台のものもあります.
ドローンの自作に関しては,BanggoodやAliExpressなどから多用なパーツを安価に入手することができます.
オープンソースのフライトコントローラーも存在します.
このように変化してきた環境の中で再び空飛ぶ模型を自作してみることにしました.
ドローンといっても空撮用やレース用など様々な種類がありますが,自分が興味があるのは狭い室内でも飛行可能な小型ドローンで,特にここではローターが4つあるクアッドコプターを考えます.
クアッドコプターはローターの配置によりX型と+型が存在しますが,どちらも時計回りのプロペラ2つと反時計回りのプロペラ2つを交互に配置して,それぞれの推力を変化させることで機体を上下,前後左右,右回転左回転と制御することができます.
ブラシモーターを使ったトイドローンは既に多く市販されているので,寿命の長いブラシレスモーターを使いたいと思いました. 電源に関しては,カメラなどを後から搭載しても推力に余裕があるようにLi-Poバッテリー2つ(2S)を使うことにしました. 使用するプロペラは5インチに決定して,ドローンのホイールベース(対角線上のモーターの間隔)は200mmとしています. モーターやESC (Electronic Speed Controller)等の部品は下記のものを使いました:
| 部品 |
型番 |
個数 |
| ブラシレスモーター | Racerstar BR1306 3100KV | 4 |
| ESC | RW.RC BLHeli V14.2 OPTO mini 16A | 4 |
| プロペラ | Gemfan 5030 ABS | 4 |
| プロペラガード | Diatone Glass Fiber 5030 Propeller Protective Guard | 4 |
| Li-Poバッテリー | Eachine 3.7V 750mAh 25C | 2 |
最初は市販のフライトコントローラーなどを使用して作ったものの,いくつか問題がありフライトコントローラーを自作するなどして改造を加えました. ここではそれぞれ1号機と2号機と呼ぶことにします. 各部品等の重量は下の表のようになりました. 1号機も2号機もどちらも法律の規制を受ける重量の200gより軽く仕上がっています. 結局やめましたが,もともとはカメラを付けたRaspberry Pi Zeroを搭載して画像を転送したり自動操縦してみたいと考えていて,それらを載せたとしても200gを切ります(なお規制を受ける重量は,プロペラガードやカメラを除いた重量なのでどのみち問題ありません).
| 部品 | 個数 | 合計重量 (g) |
| BR1306 3100KVモーター (キャップあり,2つの固定用ワッシャーとネジつき,ケーブル長さ調整前) | 4 | 50.30 |
| RW.RC BLHeli 16A ESC (シュリンクとケーブルなし) | 4 | 8.00 |
| 5030プロペラ | 4 | 7.57 |
| 5インチプロペラガード | 4 | 20.68 |
| XY7000S受信機 | 1 | 10.48 |
| Li-Po 3.7V 750mAh 25C | 2 | 32.32 |
| MultiWii V2.6 | 1 | 9.57 |
| 1号機フレーム1階部分のみ(接着剤で固定後,ネジやスペーサーは含まない) | 1 | 16.12 |
| 1号機用新しい配電盤 | 1 | 6.47 |
| Raspberry Pi Zero + カメラモジュール + Wi-Fiドングル | 1 | 15.15 |
| 1号機完成総重量 | 1 | 181.86 |
| 2号機完成総重量 | 1 | 164.90 |
フレームは1.2mm厚のガラスエポキシ基板をCNCフライスでカットして,銅箔をはがして使用しました. フレームのアーム部分と本体はエポキシ接着剤で接着しました. ESCのアームへの固定には軽量なポリイミドテープを使いました.プロペラガードは自作せず既製品を使いました. フレームは三階層になっており,フレームの下部(地下部分)にバッテリーがあります. フレームの上(一階部分)にはまず分電盤があり,その上にフライトコントローラーがあってこの基板が一階と二階を分け,その上(二階部分)に受信機があります. フライトコントローラーと受信機は既製品のMultiWii SE V2.5とHiSKY XY7000Sを使用しました. 分電盤は最初銅泊テープを使ってESCの電源ケーブルをハンダ付けできるものを作りましたが,メンテナンス性のためピンヘッダを使うものに作り変えました.この配電盤には,定電圧レギュレータと電圧低下検出用回路(分圧抵抗),そして前後のLEDライトがついています. フライトコントローラーのファームウェアはMultiWii 2.4を若干変更して使用しました.
完成した機体の電源を入れて初飛行をさせました.推力には余裕がありましたが,ホバリングさせてみると不安定でした.MultiWiiのAngle (6軸制御)モードを指定していて,水平方向は問題ないのですが,スロットルを操作していなくても垂直方向に機体が勝手に揺れてしまいます.また2Sの200mmサイズのドローンは,やや大きくパワーがあって怖いので室内で使うには少し不向きかなと感じました.FPVにして室内で楽しみたいと思っていましたが,操縦の不安定さや大きさのため難しいと思います.重心が高いためか墜落すると上下さかさまに落ちてプロペラが傷ついたりしたので,次の2号機ではフラットな重心の低い機体にしてみました.
1号機と比べてモーターやプロペラ等は同じですが,フレームを新しくデザインしてフライトコントローラーなどの制御系等をシンプルにしたバージョンです. フレームは1mm厚のFR4を使い,アーム部分は二枚重ねにして強度を増やしています. 本体とアーム部分は接着ではなくネジ止めです. フライトコントローラーは「ドローン用フライトコントローラー(ハードウェア編)」で説明したもの(ユニバーサル基板バージョン)を使用しました.
飛行させたところ,基本的にファームウェアは1号機と同一なのでフライト感覚はほとんど変わらず,やはり垂直方向に対する不安定さがあり操縦が難しいと感じました. そのうちにファームウェアを修正してみたいと思っています.
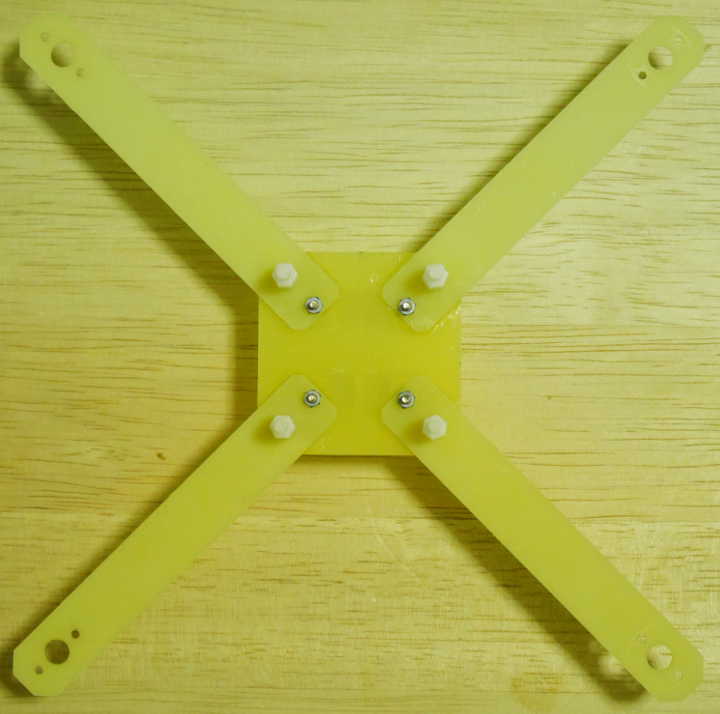 フレームの一階部分
フレームの一階部分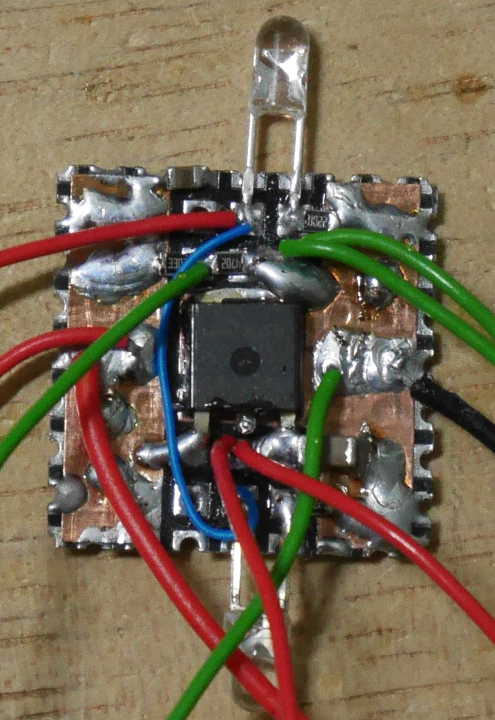 古い配電盤(表)
古い配電盤(表)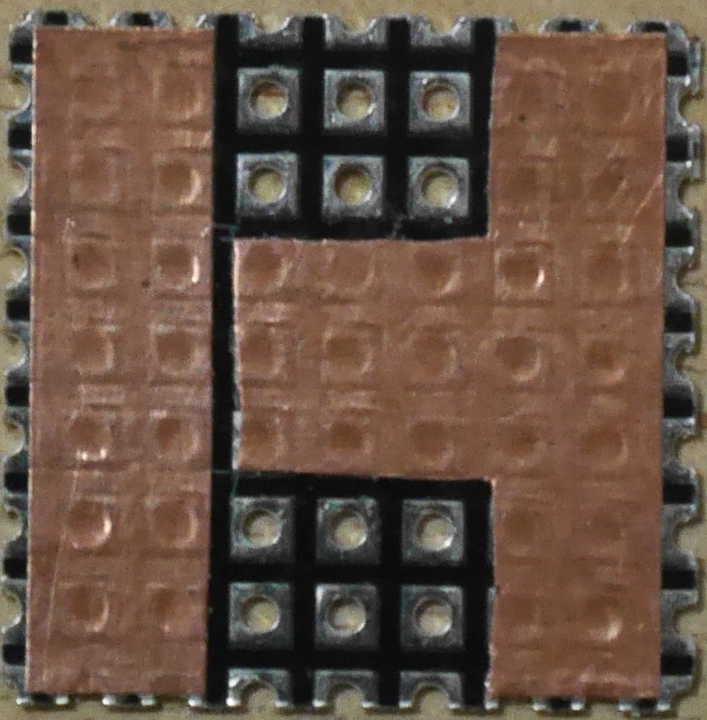 古い配電盤(裏)
古い配電盤(裏)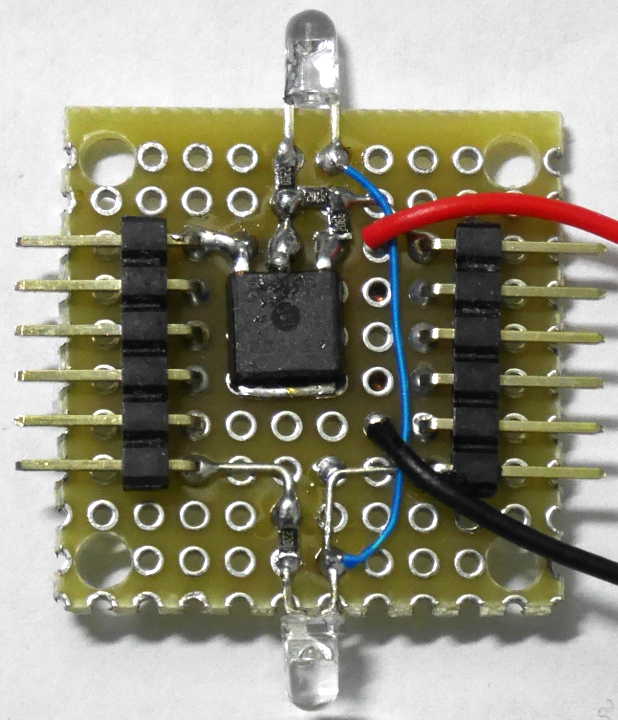 新しい配電盤(表)
新しい配電盤(表)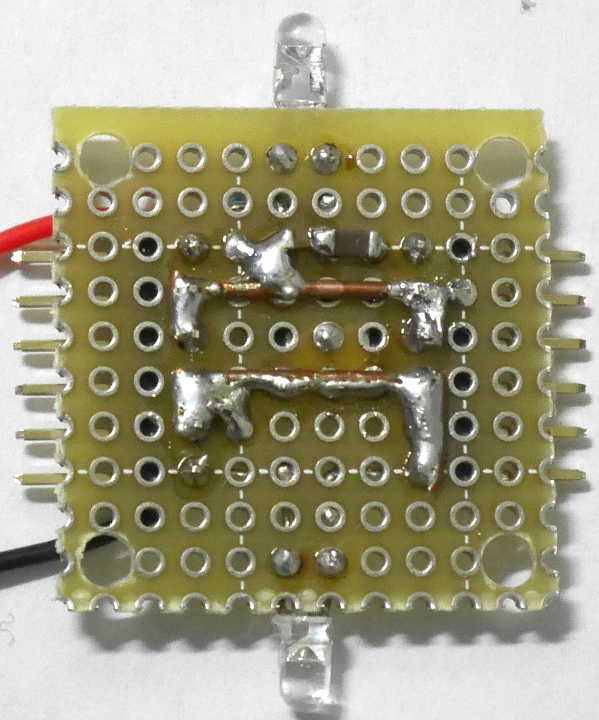 新しい配電盤(裏)
新しい配電盤(裏) 機体の全体写真
機体の全体写真 機体の上面
機体の上面 機体の側面
機体の側面 機体の全体写真
機体の全体写真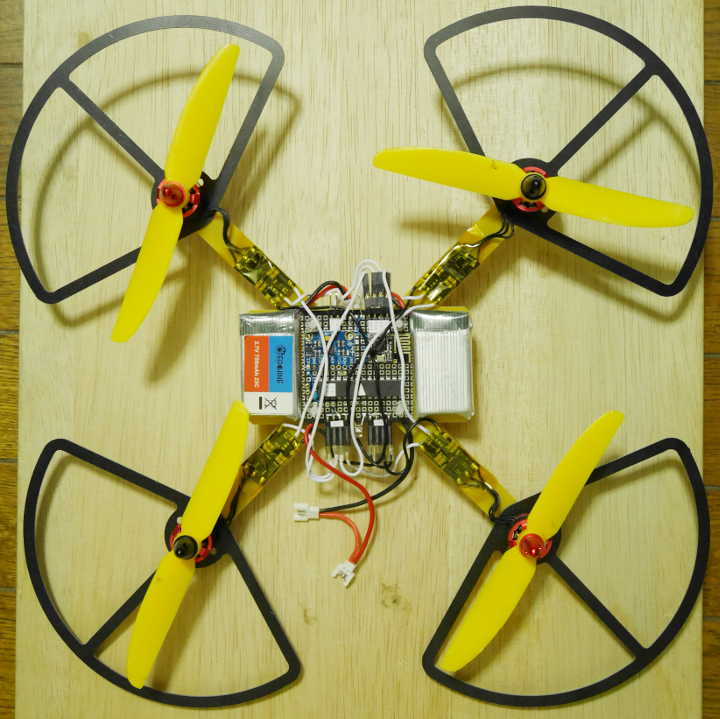 機体の上面
機体の上面 機体の側面
機体の側面